STRUCTURAL HIGH CYCLE CREEP-DAMAGE PROCESSES
BRESLAVSKY
D., MORACHKOVSKY O.,
National Technical University «Kharkiv
Polytechnic Institute»,
21 Frunze Str., Kharkiv, 61002, Ukraine
e-mail: brdm@kpi.kharkov.ua
The paper is devoted to
theoretical foundations and method of simulation for cyclic creep-damage
processes in structural members. The basic equations were derived by use of the
method of asymptotical expansions on small parameter as well as the method of
averaging on the period of a stress
cycle. The cyclic creep-damage constitutive equations, which were derived by
the authors, are given. The possibilities of the method are illustrated by
examples of numerical calculations of turbine blades.
1. Background and significance. The
behaviour of materials in structures under elevated temperatures is essentially
time-dependent. Large amount of structural members are working under variable,
cyclic loading. The phenomenon of ‘creep-fatigue interaction’ is well known and
investigated for the case of low-cycle fatigue. At the same time the working
conditions of different engineering objects, such as gas-turbine engines,
supersonic planes etc. are characterized by significant frequencies of external
oscillation action (more than 1..3 Hz). The number of cycles to fracture in
that case is more than 50000-100000. In conditions of joint action of static
and cyclically varying stress fields the cyclic creep strains are developed in
solids. Usually they are accompanied by damage accumulation processes, which
are lead to fracture.
The paper is devoted to the presentation of
mathematical models and constitutive equations for creep-high cycle fatigue
interaction processes in solids.
2. Problem statement. Let us regard the solid with volume V, fixed on the surface part S1
and loaded by traction р on another surface part S2=S3ÈS4. The material points continuum’s motion in co-ordinate
system x=(x1,x2,x3) will be described by
Lagrange approach by vectors of displacements u and their rates v, by stress sij=sji and strain eij=eji (і,j=1,2,3) tenzors, which are the functions
of co-ordinates and time t. Creep irreversible strains without consideration of
their influence on compression will be described by tenzor cij=cji
. Used constitutive equations define the tenzorial connection between the creep
strain and stress tenzors and time. Let us refine the character of external
loading field. The external forces will be divided on two components, which are
the basic and the oscillatory actions. The first one includes the volume forces
f(x,t), xÎV, and the traction part
р0(x,t), xÎS3 , which is slowly varying in time or remains constant.
The oscillatory field
of external loading, which is acted on S4 (in particular case it can
be S4ÎS3), is
regarded as polyharmonic with components
![]() , (1)
, (1)
where pri, pqi are the
amplitudes of traction components, which correspond for harmonics with index
‘г’ or ‘q’; Ri, Qi are the numbers of harmonics.
The Фі(t) are the periodic polyharmonic functions with
period, such as ![]() , where t* is time to creep fracture.
, where t* is time to creep fracture.
Mathematical problem
statement for boundary – initial value creep problem for cyclically loaded
solids by use the formulated assumptions can be presented by following system
of equations:
![]()
![]()
![]()
![]() ;
; ![]()
![]() (2)
(2)
![]() ,
, ![]() ,
,
where r is the mass density, n –
the normal unit for solid boundary, і=1,2,3; Сijkl is the tenzor of
material elastic properties; `ui are the known values of surface S1 points
displacements, which are constant in
time.
The system (2) is
substantially nonlinear. It is connected with nonlinear correlations between
creep strain tenzor cij and stress tenzor sij. The definite form of
constitutive equations is discussed below. The nonlinear geometric relations
with small strains and shears will be considered.
From
the mathematical point of view, the considered problem is referred to the
system of differential equations for the motion of a solid under the action of
static and cyclic external loading. Creep analysis using a class of implicit
single step algorithms is not possible in this case because the large number of
small time steps usually required for accurate solution could not be
successfully extended to dynamic problems.
Due to the fact that
period of oscillatory action T is much more smaller than period of basic motion
t* ,the asymptotical expansions (AE) on the small parameter ![]() with coefficients,
which are dependent upon both variable t (slow or macroscopic motion) and
variable t=t/m or x= t/T (fast or microscopic motion) for the unknowns of system (2) can be
written:
with coefficients,
which are dependent upon both variable t (slow or macroscopic motion) and
variable t=t/m or x= t/T (fast or microscopic motion) for the unknowns of system (2) can be
written:
![]() . (3)
. (3)
Here under z the arbitrary unknown of system (2) can be considered; x,
t, and x can be considered
formally as independent variables. zi is one-periodic function of x (0 £ x £ 1) ,and its averaged on
the period values are equal to zero:
ázi(x,t,x)ñ=![]() (4)
(4)
As usual, we can write
for time derivative:
![]() . (5)
. (5)
Let us save only two
terms in each of asymptotic expansions (3):
![]() . (6)
. (6)
For example, for displacements and stress we have:
![]() ;
;![]() . (7)
. (7)
With consideration of (5) the following expression can be obtained for
displacements rates:
![]() , (8)
, (8)
where ![]() ,
, ![]() .
.
For strain rate
components we have:
![]()
![]() . (9)
. (9)
Due to the fact that penultimate term in (9) has the m2 as a multiplayer and due
to regarded small vibrations, we can neglect the considered penultimate term.
The analysis of underlined term shows, that it is infinitely small in
comparison with another terms and we can neglect this term too. Then, by
signing
![]() ; (10)
; (10)
![]() ,
,
we obtain the expression for strain tenzor
![]() . (11)
. (11)
Let us mark, that in
equations (7) - (11) the coefficients of the m depend not only upon t or x, but upon co-ordinates х too.
Than derived equations
(7) - (11) can be substitute to the basic system (2), which
determines the solid motion in the case of cyclic creep.
Further the obtained
equations can be averaged on the period of oscillations. For example, for equilibrium
equations we have:
![]() (12)
(12)
For the physical
equations:
![]() , (13)
, (13)
and so on. The average values of coefficients are equal to themselves,
<z1>=0 due to (4).
The asymptotical
expressions and averaging on the period allows to divide the initial system (2)
on two ones: the first system appears from relations are left after averaging
on the period of oscillations, and describes the processes which take place in
slow basic motion:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (14)
(14)
![]() ,
, ![]() ,
, ![]()
Here all unknowns are the functions which are slowly varied in time
scale t. Inertial term in (14) are formally followed from derived equations,
but in practical calculations it have to be neglected.
The second system can
be obtained by subtraction the (2) and (14):
![]()
![]()
![]()
![]()
![]()
![]() (15)
(15)
![]() ;
; ![]() ,
, ![]() , 0<x<1
, 0<x<1
In this system all unknowns are varied in fast time scale x.
The system (15) is
linear. With accuracy of multiplayer 1/m2 it corresponds to the problem of small
elastic forced vibrations. So, the solution of this system can be found as a
superposition of harmonic functions, which are varying with frequencies 2prm [2]. The solution can be
obtained by division the variables on co-ordinates and time:
![]() (r=1,R) ,
(r=1,R) , ![]() (q=1,Q). (16)
(q=1,Q). (16)
After usual transformations, the system of equations for the boundary
problem for amplitude values of ‘q’ harmonic of ‘fast’ unknowns takes the
following form:
![]() ,
, ![]()
![]() ;
; ![]()
![]() ,
,![]() ;
;![]()
![]() (17)
(17)
Similar system can be
written for the ‘r’th harmonic. So, we have the solution of the system (15)
![]() .
.
as a sum of the solutions for each r and q. As usual, for stresses we
can obtain:
![]() (18)
(18)
In the case of
one-periodic harmonic loading, when, for example, R=0, Q=1, we have the harmonic
process with the frequency of forced vibrations W=2p/T.
When we can consider
not both infinitesimal strains, and infinitesimal angles of rotations, as it
can be observed in many cases, the geometric relations in (14) are linearized
and take the form:
![]() (19)
(19)
Two obtained systems (the
first one for basic motion in creep-damage process and the second system
describing the forced oscillations) are not independent. As were found by
different experimental observations [3], the stress values (18) are obtained
after solution of system (15), have to be included to the flow rule and the
damage evolution equation.
3. Constitutive equations. Now let us present new cyclic
creep-damage constitutive equations with consideration of damage due to creep
and high-cycle fatigue.
The
concept of rational mechanics was used. Following it, the description of the
material evolution due to the cyclic loading will be done by such observable
variables as full strain tenzor e=ee+c and temperature Т, by internal variables
such as creep strain deviator and structural parameters; and associated
variables such as stress tenzor s, entropy and thermodynamic forces.
So-called
high-cyclic processes of loading were considered. In that case the time to
fracture value is equal to t*=N*/f, where f is the
frequency of the cyclic loading, and the number of stress cycles in a material
point is more than N*=(0.5..1)×105. In considered
conditions the relation between the cyclic stress period Т=1/f and time to fracture is a small parameter
which is less than 1:
![]() . (20)
. (20)
The processes of high-cycle fatigue and
so-called ‘dynamic creep’ processes [3] are corresponded to conditions (20).
Used
creep constitutive equations are :
![]() (21)
(21)
and
![]() (22)
(22)
with damage w evolution equation:
 (23)
(23)
The
equations (21)-(23) are used for description of the cyclic creep processes
using the method of asymptotical expansions of all variables on small parameter
m with coefficients, which depend upon both t
(‘slow’ motion with index’0’) and t= t/m or x= t/T (‘fast‘ motion with index ‘1’).
Simple
cyclic loading, when all stress deviator’s components are varied by the same
ways in the 5D stress space, is considered.
The
asymptotic expansion of stress tenzor has the form (7). Two terms are retained
here. Fast varying stress component has the following presentation:
![]() , (24)
, (24)
where sr, sq – are amplitude values of harmonics, R, Q
are the numbers of harmonics.
By
use the asymptotic expansions and the averaging in a period technique for the
equations (21)-(23) the equations for description of high cyclic creep-damage
processes are obtained.
In
the case of one harmonic loading and power creep law the approximate analytical
expressions for dynamic (A<Acr) creep rate with consideration of
damage evolution were obtained: For example, for Norton creep-damage law we
have:
![]() ; (25)
; (25)
![]() , (26)
, (26)
where svМ, seq – are von Mises stress and equivalent stress
in three invariants criterion; ![]() are the stress cycle asymmetry parameters; H(A)=G(A;n), K(
are the stress cycle asymmetry parameters; H(A)=G(A;n), K(![]() )=G(
)=G(![]() ;m);
;m);![]() ; B, D, n, m, l – are the material constants.
; B, D, n, m, l – are the material constants.
The
relation![]() , which was built using the widespread hypothesis of the
different kinds of damage accumulation [4], was used for general high cyclic
creep-damage evolution equation. The functions af(
, which was built using the widespread hypothesis of the
different kinds of damage accumulation [4], was used for general high cyclic
creep-damage evolution equation. The functions af(![]() ) and bf(
) and bf(![]() ) allow to represent the income of both damage mechanisms
(creep wс and high cycle fatigue wf) into the accumulated damage. At the same time
those functions can be regarded as a probabilities of transitions to fracture
due to creep or high cycle fatigue mechanisms.
) allow to represent the income of both damage mechanisms
(creep wс and high cycle fatigue wf) into the accumulated damage. At the same time
those functions can be regarded as a probabilities of transitions to fracture
due to creep or high cycle fatigue mechanisms.
The
use of applicable invariants for the damage description at the case of complex
stress state is discussed. The equivalent stress from three invariants
criterion is used for creep damage; high-temperature high cyclic fatigue damage
is described using the Sines criterion by equivalent stress cf. The forms of influence functions af(![]() ) and bf(
) and bf(![]() ) were chosen due to experimental data.
) were chosen due to experimental data.
For
example, let us present the more frequently used form of constitutive
equations:
 ; (27)
; (27)
 w0(0) = 0, w0(t*) = 1, (28)
w0(0) = 0, w0(t*) = 1, (28)
where s0ij is the stress
deviator components are varied in ‘slow’ time.
The
material constants B, D, n, m, l, Ff, p, q and functions af, bf are included in (27)-(28) have to be
determined by creep-fatigue experiments. The suggested equations were built using
the criterion of the minimum number of these constants. In general case this
number is equal to 14. The basic experiments, which have to be provided in
order to determine these constants, were selected. All of them are standard for
the creep and fatigue theories. The additional experiment is cyclic creep
testing with the different levels of stress cycle asymmetry parameter.
The
thermodynamic justification of the above equations has been done and their
agreement with the fundamental laws of solid mechanics has been verified.
The presented high cyclic creep-damage equations were
verified by use of known experimental data. Cyclic creep curves, long-term
strength curves, limit strain curves for more than twenty high-temperature
steels and nickel-based alloys were used for the verification.
These
experiments show rather high power of accuracy. The maximum error in cyclic
creep description is equal to 25-30%, for creep damage parameters is equal to
15-25%, for fatigue damage parameters is equal to 25-30%. Obtained accuracy
allows to recommend the derived cyclic creep-damage equations for the long-term
strength estimations.
The systems of equations (14), (15)
are added by the physical relations (27) – (28) determine the mathematical
problem of high cyclic creep-damage at the complex stress state.
The
FEM algorithms using for the numerical simulation are discussed in [5], [6].
4. Numerical example. Let us present the results of numerical
investigations of turbine blades using the calculation scheme of short plane
plates. The creep process in blades loaded by centrifugal forces and normal
pressure with harmonic law (in case 1 the frequency is 100 Hz, in case 2 the frequency
is 1100 Hz) were studied. The materials are high temperature nickel-based
alloys EI867 and EP109 at temperature 1173К.
Triangular plane
elements were used. The analysis of eigen value problem shown that cases 1 and
2 correspond to the plate’s motion due to first and second forms of forced
bending vibrations.
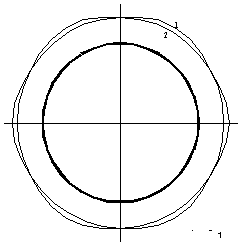
Figure 1 demonstrates the levels of
damage parameter w at the blade surface (alloy EI867)
before the fracture moment at cases 1 (left) and 2 (right). The results show
that the area near the maximum damage value is corresponded to the area in
which the macrocracks can initiate according to the experimental data.
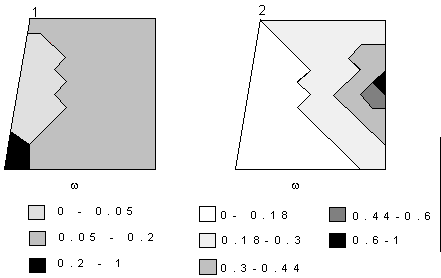
Figure 1. Damage parameter distribution in the blades
The
temperature fluctuations in nuclear reactors lead to the repeated deformation
of the shell surface in heat assemblies. This one causes the high frequency
loading. The problem is regarded with the purpose of evaluation the
stress-strain state and the creep damage accumulation. The calculational scheme
of the heating element is the cylindrical shell made from high-temperature type
316 L steel. The temperature is equal to 873К. The internal pressure is varied
due to the following law: p=p0+pa×sin2pft×cos3j, where j is the angle co-ordinate, p0,
pa are the constant and the amplitude pressure components.
The
four node finite element of the shell of revolution with 28 degrees of freedom
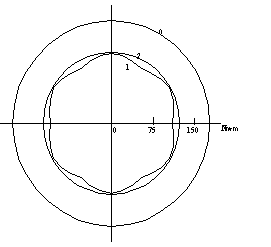
was used for the numerical simulations. The results (figure 2) were obtained
for cyclic (curve 1, L= pa/p0 =0.05) and static creep
under the pressure p0=65МПа (curve 2). The analysis of the numerical
data shows, that the symmetric character of deformation was lost due to cyclic
creep. The reason of this nonaxisymmetric strain accumulation is the
substantial angle irregularity of the pressure. After the first year at the
working conditions the important shape changes can be observed (figure 2, a).
Here the initial shell geometry is drawn by the bold line (the scale 1 is equal
to 1 mm); curves 1 and 2 show the static and cyclic creep deflections.
The
relaxation of the maximum stresses is caused the nonaxisymmetric stress
redistribution (figure 2,b). Here the curve’0’ is marked the initial level of
axial force N1 at t=0.
The
results show, that cyclic variation of the pressure has to be added to the
usual limit factors, such as elevated temperatures, pressure and irradiation
effects. The lost of shell shape can be the first reason of fracture in this
case.
a
b
Figure 2. Variation of the shell
shape and axial forces in the central cross section
5. Conclusions. The
method for the cyclic creep-damage problem solution, which is based on the procedures
of asymptotic expansions and averaging in the period of the solid’s forced
vibrations, is presented here. This mathematical technique leads to some
‘homogenisation’ of the cyclic creep-fatigue process.
The
obtained numerical results show, that the properties of cyclic creep strain and
damage accumulation in 2d objects are the decreasing of the lifetime and the
increasing of creep strain rate in comparison with pure static loading.
References: 1. Breslavsky D., Morachkovsky O. A new model of nonlinear dynamic creep// IUTAM Symposium on Anisotropy, Inhomogenity and Nonlinearity in Solid Mechanics.- Dordrecht: Kluwer Academic Publishers. - 1995. - P. 161-166. 2. Warburton G.B. The dynamical behaviour of structures. Oxford et al: Pergamon Press, 1976. 3.Rabotnov Yu.N. Creep problems in structural members. – Amsterdam: North Holland, 1969. 4. Lemaitre J., J.-L.Chaboche. Mechanics of solid materials. - Cambridge: University press, 1994. 5. Breslavsky D., Morachkovsky O. Dynamic creep continuum damage mechanics: FEM-based design analysis// Computational Plasticity: Fundamentals and Applications. Proc. of the Fifth International Conference on Computational Plasticity held in Barselona, Spain, 17-20 March 1997. - Barselona :IMNE. - 1997. - Part 1. - P.1071-1076. 6. Altenbach H., Breslavsky D., Morachkovsky O., Naumenko K. Cyclic Creep-Damage in Thin-Walled Structures// Journal of Strain Analysis for Engineering Design. 2000, Vol.35, No 1. –p.p. 1-11.