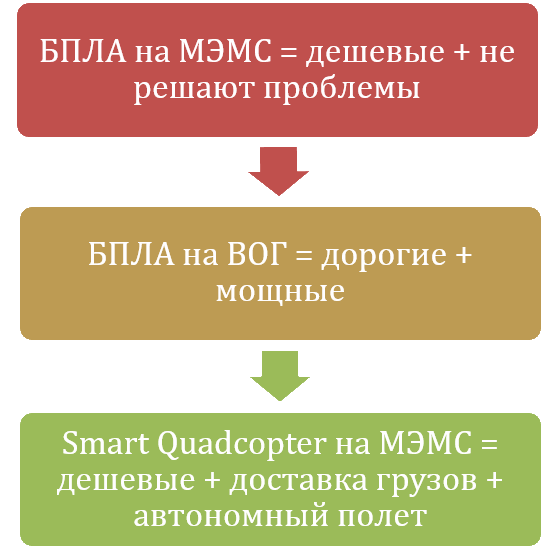
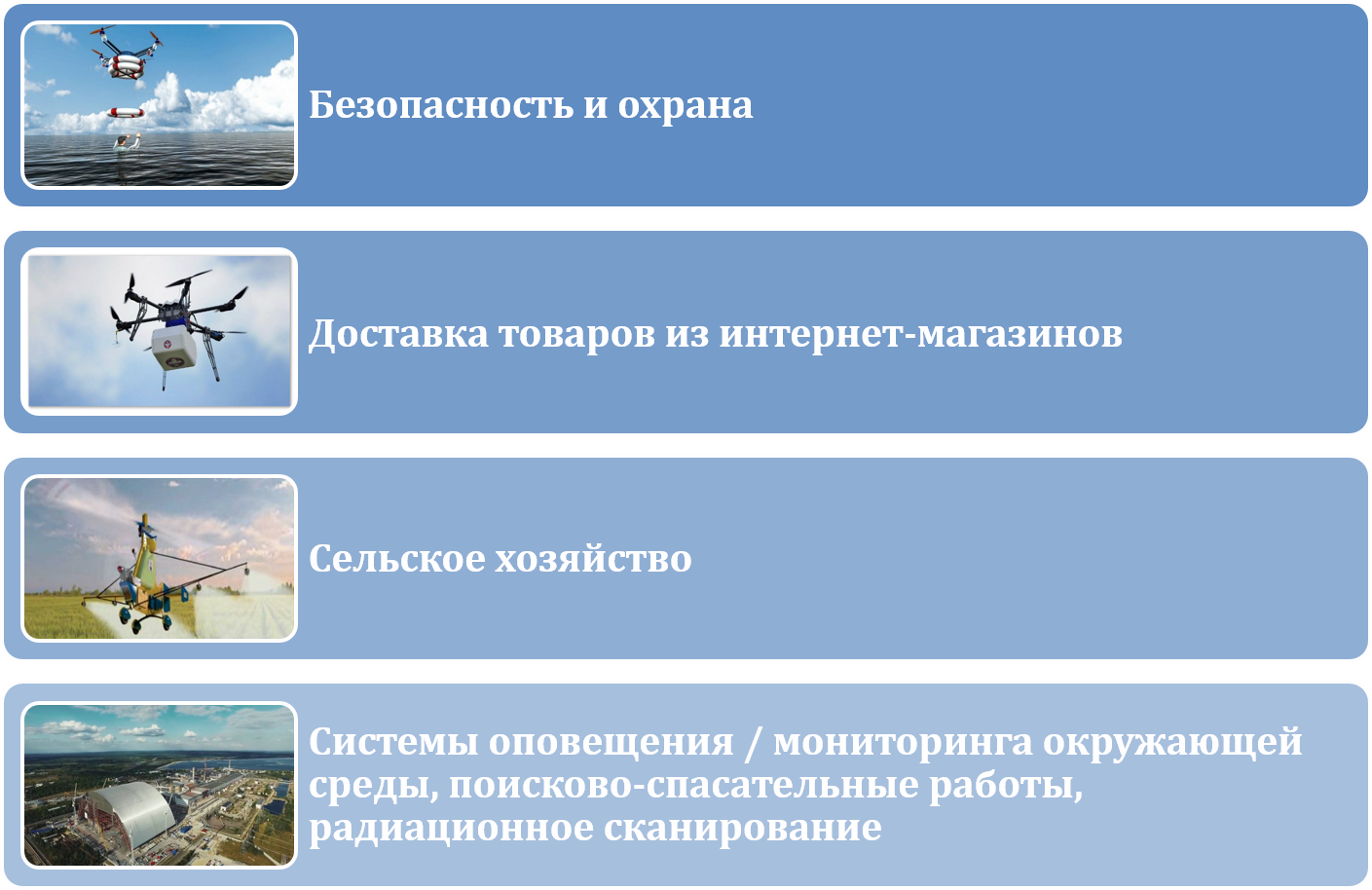
Проблема: Существующие БПЛА с навигационными системами не решают общих проблем для индустрий безопасности и охраны, сельского хозяйства и доставки грузов, так как БПЛА:
- не могут работать в автономном режиме и могут работать только в области видимости;
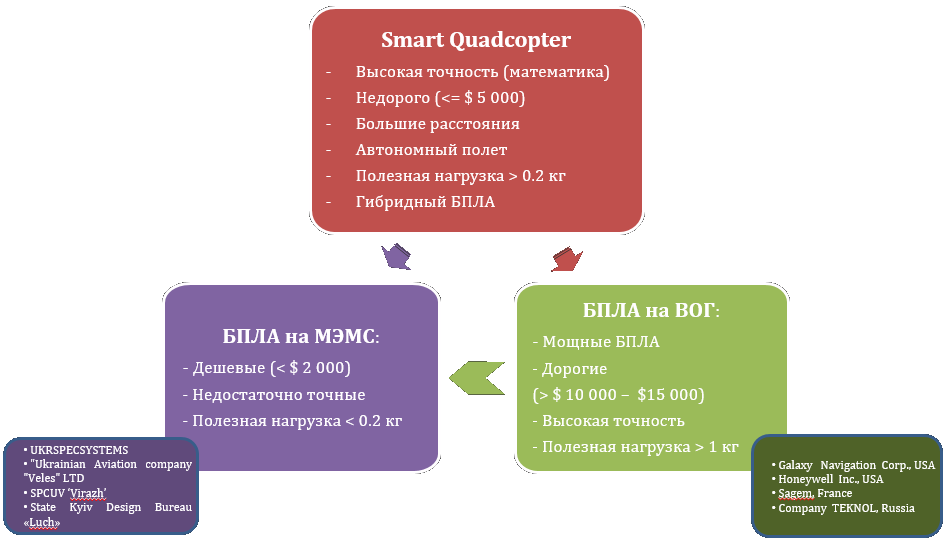
- не могут отправить груз весом более чем 0,2 кг (полезная нагрузка чрезвычайно мала);
- способны летать в течение короткого периода времени (около 20-30 мин).
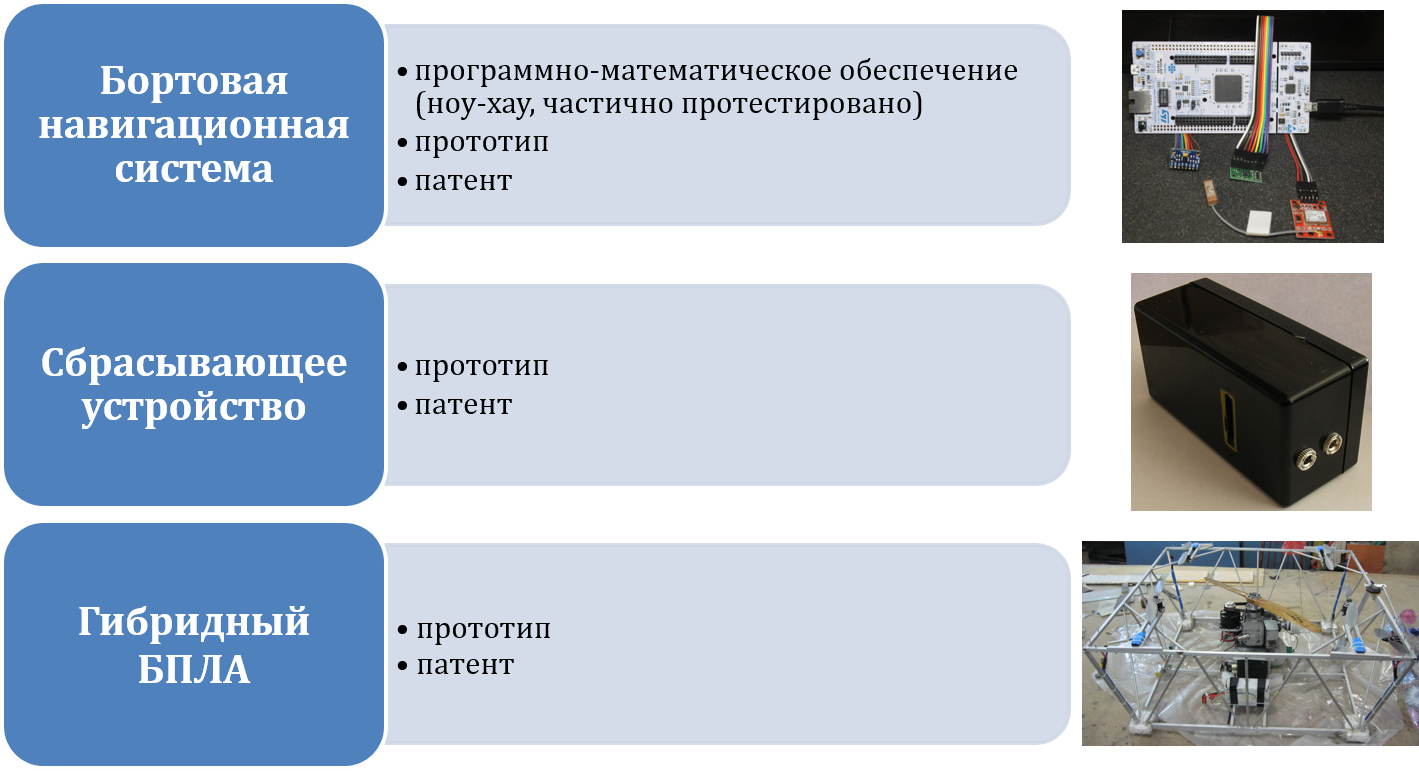
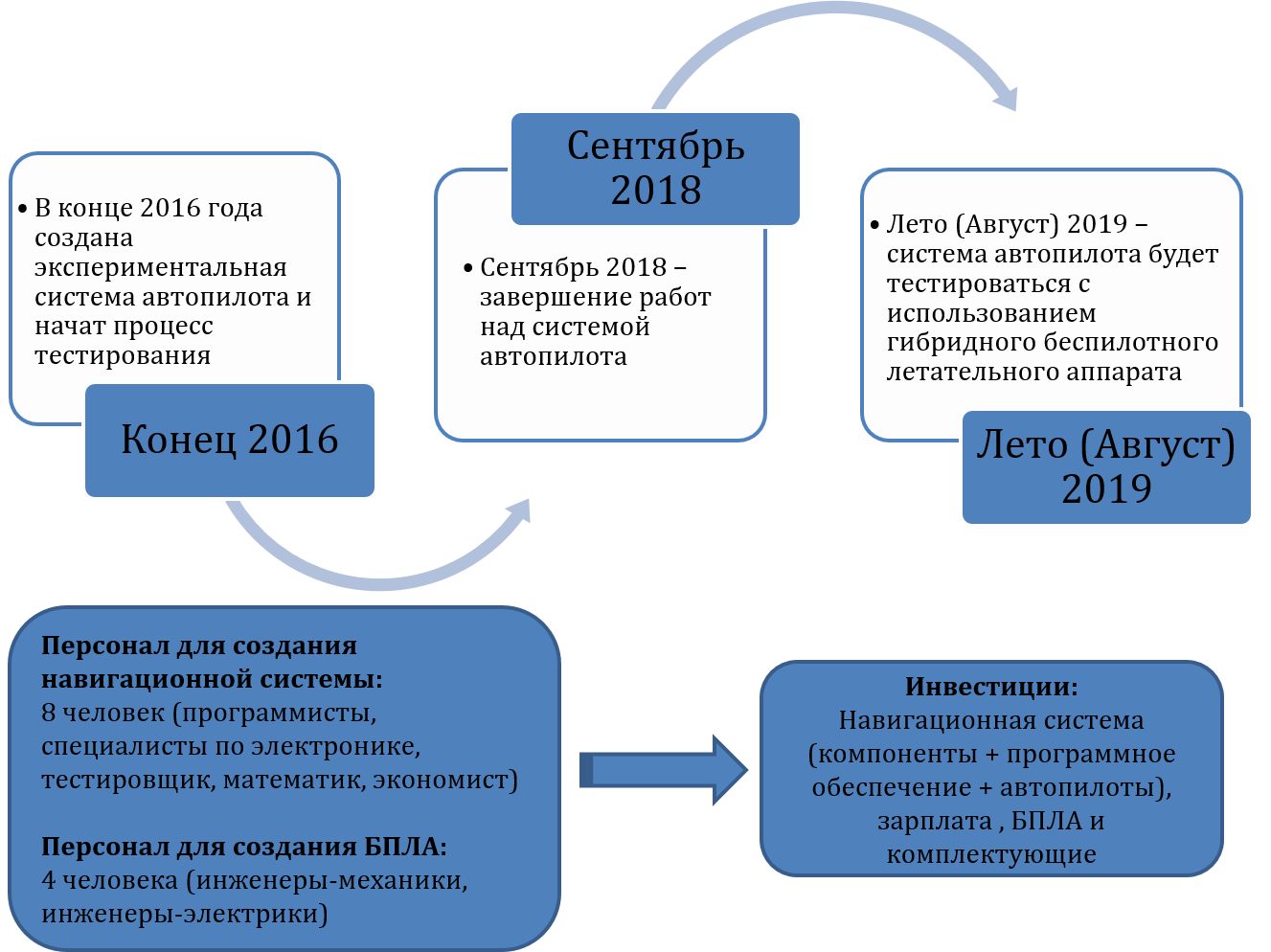
Решение: создан прототип бортовой навигации и контрольно-измерительного оборудования, а также создана экспериментальная модель гибридного БПЛА – Smart Quadcopter.