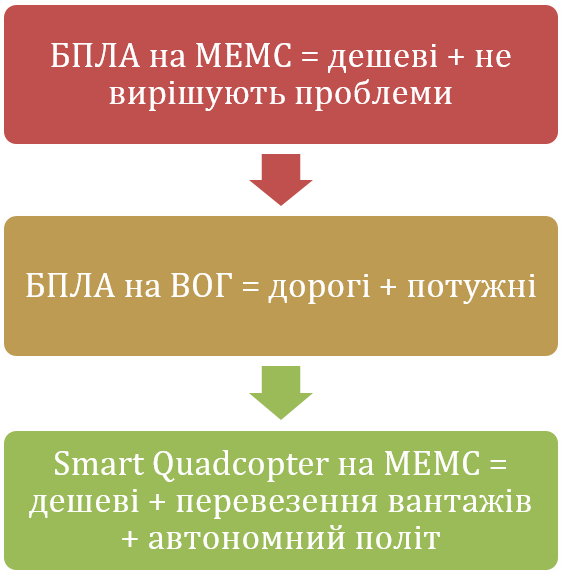
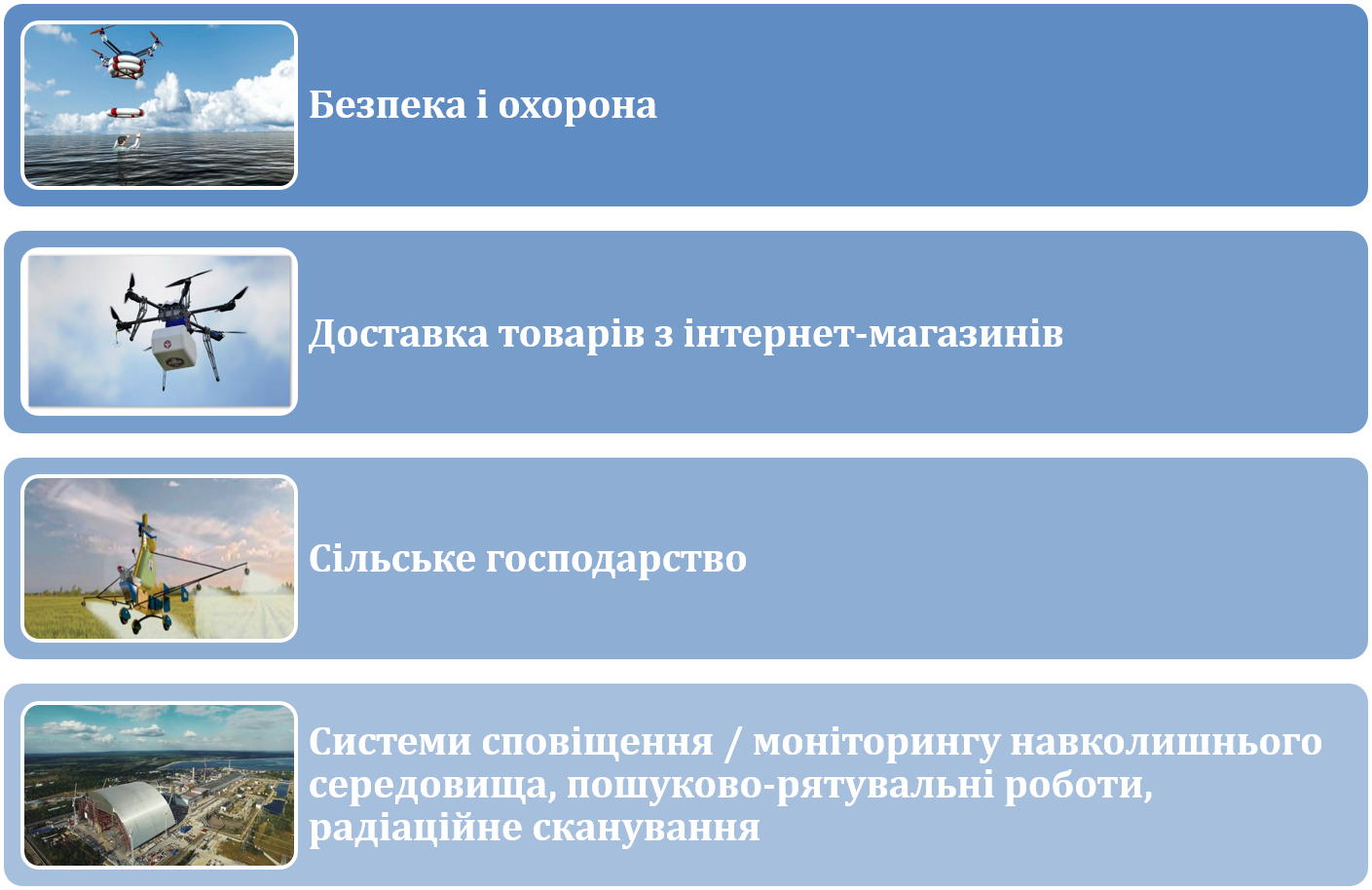
Проблема: Існуючі БПЛА з навігаційними системами не вирішують загальних проблем для індустрій безпеки та охорони, сільского господарства та доставки вантажів, через те що БПЛА:
- не можуть працювати в автономному режимі і можуть працювати лише у видимій області;
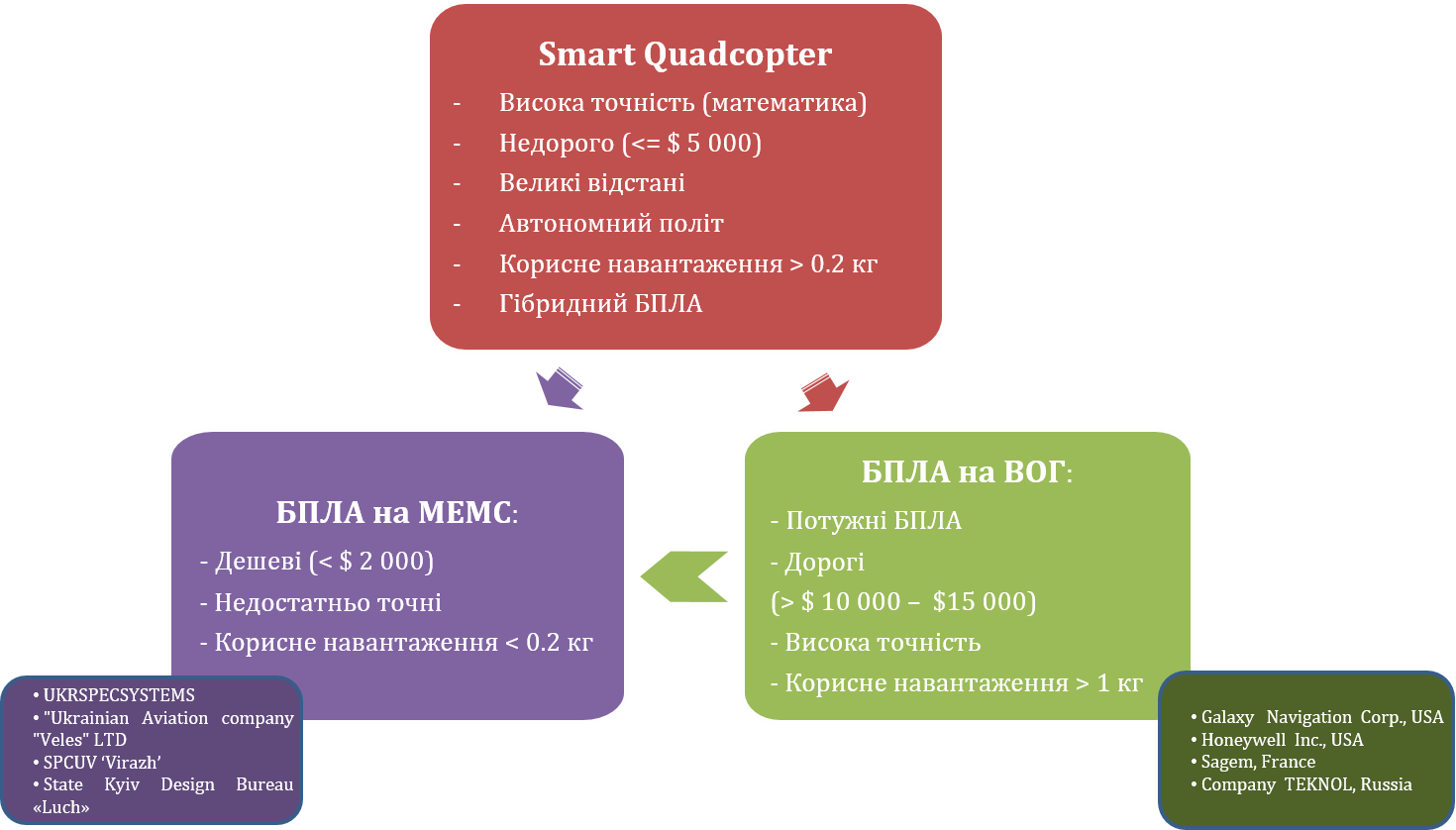
- не можуть переносити вантаж вагою більш ніж 0,2 кг (корисне навантаження надзвичайно невелике);
- здатні літати протягом короткого періоду часу (близько 20-30 хв).
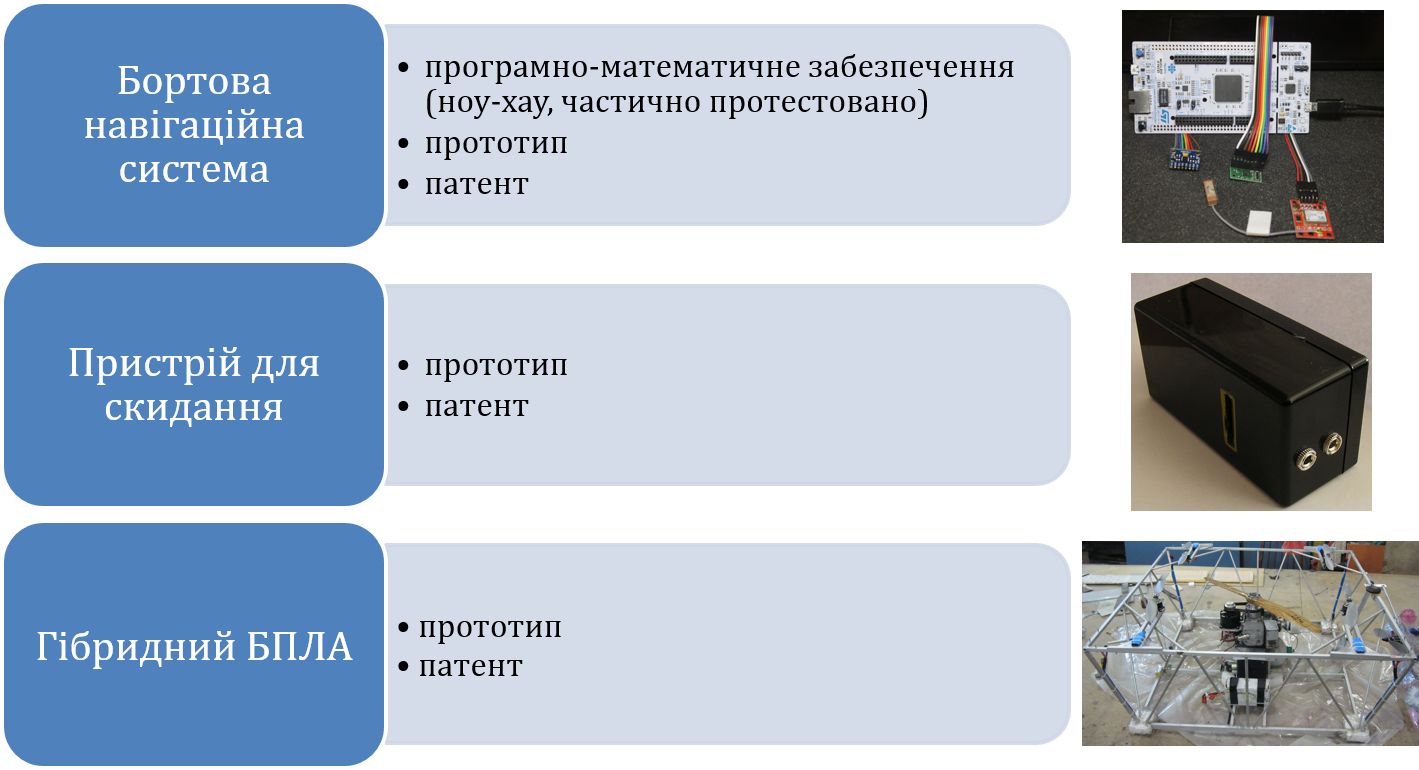
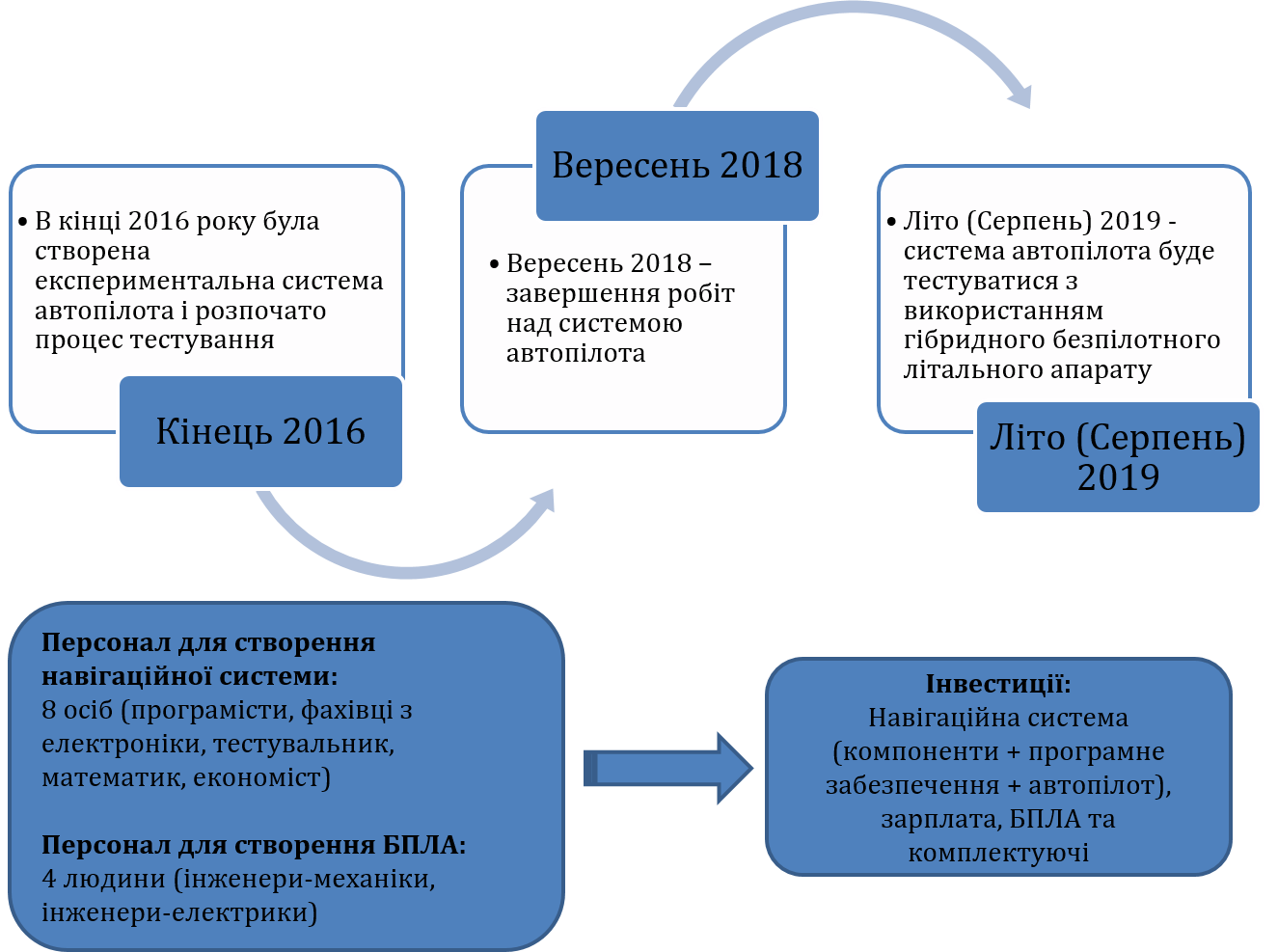
Рішення: створений прототип бортової навігації та контрольно-вимірювального обладнання, а також створена експериментальна модель гібридного БПЛА – Smart Quadcopter.